[1]:
# To run this in Google Colab, uncomment the following line
# !pip install geometric_kernels
# If you want to use a version of the library from a specific branch on GitHub,
# say, from the "devel" branch, uncomment the line below instead
# !pip install "git+https://github.com/geometric-kernels/GeometricKernels@devel"
Matérn and Heat Kernels on Meshes¶
This notebook shows how define and evaluate kernels on a simple mesh.
Inside, we use potpourri3d and robust_laplacian to work with meshes.
We use the numpy backend here.
Contents¶
Basics¶
[2]:
# Import a backend, we use numpy in this example.
import numpy as np
# Import the geometric_kernels backend.
import geometric_kernels
# Note: if you are using a backend other than numpy,
# you _must_ uncomment one of the following lines
# import geometric_kernels.tensorflow
# import geometric_kernels.torch
# import geometric_kernels.jax
# Import a space and an appropriate kernel.
from geometric_kernels.spaces import Mesh
from geometric_kernels.kernels import MaternGeometricKernel
import matplotlib as mpl
import matplotlib.pyplot as plt
from pathlib import Path
import plotly.graph_objects as go
from plotly.subplots import make_subplots
INFO (geometric_kernels): Numpy backend is enabled, as always. To enable other backends, don't forget `import geometric_kernels.*backend name*`.
Defining a Space¶
First, we create a GeometricKernels space that corresponds to a teddy bear mesh loaded from “../data/teddy.obj”
[3]:
mesh = Mesh.load_mesh(str(Path.cwd() / "data" / "teddy.obj"))
print("Number of vertices in the mesh:", mesh.num_vertices)
Number of vertices in the mesh: 1598
We define mesh plotting utils for plotly
[4]:
def update_figure(fig):
"""Utility to clean up figure"""
fig.update_layout(scene_aspectmode="cube")
fig.update_scenes(xaxis_visible=False, yaxis_visible=False, zaxis_visible=False)
# fig.update_traces(showscale=False, hoverinfo="none")
fig.update_layout(margin=dict(l=0, r=0, t=0, b=0))
fig.update_layout(plot_bgcolor="rgba(0,0,0,0)", paper_bgcolor="rgba(0,0,0,0)")
fig.update_layout(
scene=dict(
xaxis=dict(showbackground=False, showticklabels=False, visible=False),
yaxis=dict(showbackground=False, showticklabels=False, visible=False),
zaxis=dict(showbackground=False, showticklabels=False, visible=False),
)
)
return fig
def plot_mesh(mesh: Mesh, vertices_colors = None, **kwargs):
plot = go.Mesh3d(
x=mesh.vertices[:, 0],
y=mesh.vertices[:, 1],
z=mesh.vertices[:, 2],
i=mesh.faces[:, 0],
j=mesh.faces[:, 1],
k=mesh.faces[:, 2],
colorscale='viridis',
intensity=vertices_colors,
**kwargs
)
return plot
Now we actually visualize the mesh.
[5]:
# Define the camera
camera = dict(
up=dict(x=0, y=1, z=0),
center=dict(x=0, y=0, z=0),
eye=dict(x=0, y=0.7, z=1.25)
)
plot = plot_mesh(mesh)
fig = go.Figure(plot)
update_figure(fig)
fig.update_layout(
scene_camera=camera
)
fig.show('png')

Defining a Kernel¶
First, we create a generic Matérn kernel.
To initialize MaternGeometricKernel you just need to provide a Space object, in our case this is the mesh we have just created above.
There is also an optional second parameter num which determines the order of approximation of the kernel (number of levels). There is a sensible default value for each of the spaces in the library, so change it only if you know what you are doing.
A brief account on theory behind the kernels on graphs can be found on this documentation page.
[6]:
kernel = MaternGeometricKernel(mesh)
To support JAX, our classes do not keep variables you might want to differentiate over in their state. Instead, some methods take a params dictionary as input, returning its modified version.
The next line initializes the dictionary of kernel parameters params with some default values.
Note: our kernels do not provide the outputscale/variance parameter frequently used in Gaussian processes. However, it is usually trivial to add it by multiplying the kernel by an (optimizable) constant.
[7]:
params = kernel.init_params()
print('params:', params)
params: {'lengthscale': array(1.), 'nu': array(inf)}
To define two different kernels, Matern-3/2 and Matern-∞ (aka heat, RBF, squared exponential, diffusion), we need two different versions of params:
[8]:
params["lengthscale"] = np.array([2.0])
params_32 = params.copy()
params_inf = params.copy()
del params
params_32["nu"] = np.array([3/2])
params_inf["nu"] = np.array([np.inf])
Now two kernels are defined and we proceed to evaluating both on a set of random inputs.
Evaluating Kernels on Random Inputs¶
We start by sampling 10 (uniformly) random points on our mesh. An explicit key parameter is needed to support JAX as one of the backends.
[9]:
key = np.random.RandomState(1234)
key, xs = mesh.random(key, 10)
print(xs)
[[ 815]
[ 723]
[1318]
[1077]
[1228]
[1396]
[ 664]
[ 689]
[ 279]
[1257]]
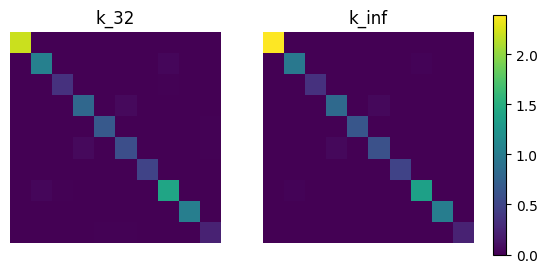
Now we evaluate the two kernel matrices.
[10]:
kernel_mat_32 = kernel.K(params_32, xs, xs)
kernel_mat_inf = kernel.K(params_inf, xs, xs)
Finally, we visualize these matrices using imshow.
[11]:
# find common range of values
minmin = np.min([np.min(kernel_mat_32), np.min(kernel_mat_inf)])
maxmax = np.max([np.max(kernel_mat_32), np.max(kernel_mat_inf)])
fig, (ax1, ax2) = plt.subplots(nrows=1, ncols=2)
cmap = plt.get_cmap('viridis')
ax1.imshow(kernel_mat_32, vmin=minmin, vmax=maxmax, cmap=cmap)
ax1.set_title('k_32')
ax1.set_axis_off()
ax2.imshow(kernel_mat_inf, vmin=minmin, vmax=maxmax, cmap=cmap)
ax2.set_title('k_inf')
ax2.set_axis_off()
# add space for color bar
fig.subplots_adjust(right=0.85)
cbar_ax = fig.add_axes([0.88, 0.25, 0.02, 0.5])
# add colorbar
sm = plt.cm.ScalarMappable(cmap=cmap,
norm=plt.Normalize(vmin=minmin, vmax=maxmax))
fig.colorbar(sm, cax=cbar_ax)
plt.show()
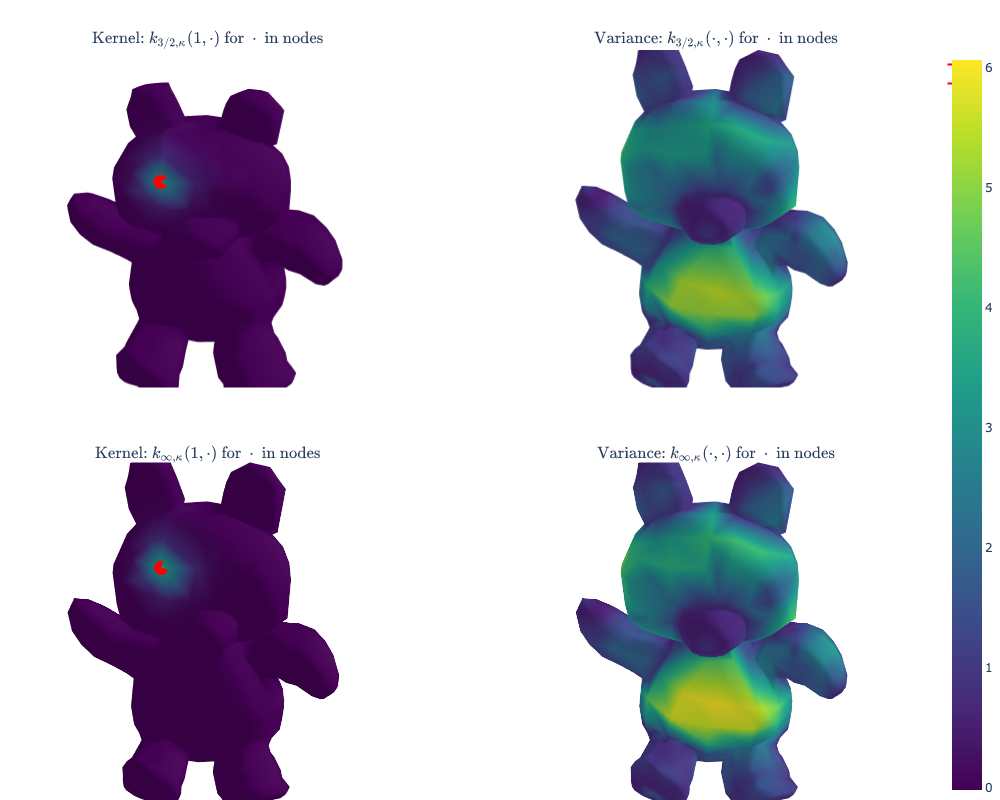
Visualize Kernels¶
Here we visualize \(k_{\nu, \kappa}(\) base_point \(, x)\) for $x \in `$ ``other_points`. We define base_point and other_points in the next cell.
[12]:
base_point = 1 # choosing a fixed node for kernel visualization
other_points = np.arange(mesh.num_vertices)[:, None]
The next cell evaluates \(k_{\nu, \kappa}(\) base_point \(, x)\) for $x \in `$ ``other_points` for \(\nu\) either \(3/2\) or \(\infty\).
[13]:
values_32 = kernel.K(params_32, np.array([[base_point]]),
other_points).flatten()
values_inf = kernel.K(params_inf, np.array([[base_point]]),
other_points).flatten()
We also evaluate the variances \(k_{\nu, \kappa}(x, x)\) for $x \in `$ ``other_points` for \(\nu\) either \(3/2\) or \(\infty\).
[14]:
# Get prior variances k(*, *) for * in nodes:
variance_32 = kernel.K_diag(params_32, other_points)
variance_inf = kernel.K_diag(params_inf, other_points)
Here are the actual visualization routines.
Note: the top right plot shows k(base_point, *) where * goes through all nodes and base_point has red outline.
[15]:
# Set the colorbar limits:
vmin = min(0.0, values_32.min(), values_inf.min())
vmax = max(1.0, variance_32.max(), variance_inf.max())
contours=dict(start=vmin, end=vmax)
# Marker for the base_point
base_point_plot = go.Scatter3d(
x=np.array([mesh.vertices[base_point][0]]),
y=np.array([mesh.vertices[base_point][1]]),
z=np.array([mesh.vertices[base_point][2]]),
marker_color = 'red',
name=''
)
# Various plots as plotly traces
values_32_plot = plot_mesh(mesh, vertices_colors=values_32, coloraxis = "coloraxis")
values_inf_plot = plot_mesh(mesh, vertices_colors=values_inf, coloraxis = "coloraxis")
variance_32_plot = plot_mesh(mesh, vertices_colors=variance_32, coloraxis = "coloraxis")
variance_inf_plot = plot_mesh(mesh, vertices_colors=variance_inf, coloraxis = "coloraxis")
# Setting up the layout
fig = make_subplots(
rows=2, cols=2,
specs=[[{'type': 'surface'}, {'type': 'surface'}],
[{'type': 'surface'}, {'type': 'surface'}]],
subplot_titles=(r"$\text{Kernel: }k_{3/2, \kappa}(1, \cdot)\text{ for }\cdot\text{ in nodes}$",
r"$\text{Variance: }k_{3/2, \kappa}(\cdot, \cdot)\text{ for }\cdot\text{ in nodes}$",
r"$\text{Kernel: }k_{\infty, \kappa}(1, \cdot)\text{ for }\cdot\text{ in nodes}$",
r"$\text{Variance: }k_{\infty, \kappa}(\cdot, \cdot)\text{ for }\cdot\text{ in nodes}$"),
vertical_spacing=0.1)
# Adding the traces
fig.add_trace(base_point_plot, row=1, col=1)
fig.add_trace(values_32_plot, row=1, col=1)
fig.add_trace(base_point_plot, row=2, col=1)
fig.add_trace(values_inf_plot, row=2, col=1)
fig.add_trace(variance_32_plot, row=1, col=2)
fig.add_trace(variance_inf_plot, row=2, col=2)
fig = update_figure(fig)
fig.layout.scene1.camera = camera
fig.layout.scene2.camera = camera
fig.layout.scene3.camera = camera
fig.layout.scene4.camera = camera
fig.update_layout(
margin={'t': 50},
coloraxis = {'colorscale':'viridis'},
)
fig.show('png', width=1000, height=800)
Feature Maps and Sampling¶
Here we show how to get an approximate finite-dimensional feature map for heat and Matérn kernels on meshes, i.e. such \(\phi\) that
This might be useful for speeding up computations. We showcase this below by showing how to efficiently sample the Gaussian process \(\mathrm{GP}(0, k)\).
For a brief theoretical introduction into feature maps, see this documentation page.
Defining a Feature Map¶
The simplest way to get an approximate finite-dimensional feature map is to use the default_feature_map function from geometric_kernels.kernels. It has an optional keyword argument num which determines the number of features, the \(M\) above. Below we rely on the default value of num.
[16]:
from geometric_kernels.kernels import default_feature_map
feature_map = default_feature_map(kernel=kernel)
The resulting feature_map is a function that takes the array of inputs and parameters of the kernel. There is also an optional parameter normalize that determines if \(\langle \phi(x), \phi(x) \rangle_{\mathbb{R}^M} \approx 1\) or not. For graphs, normalize follows the standard behavior of MaternKarhunenLoeveKernel, being True by default.
feature_map outputs a tuple. Its second element is \(\phi(x)\) evaluated at all inputs \(x\). Its first element is either None for determinstic feature maps, or contains the updated key for randomized feature maps which take key as a keyword argument. For default_feature_map on a Mesh space, the first element is None since the feature map is deterministic.
In the next cell, we evaluate the feature map at random points, using params_32 as kernel parameters. We check the basic property of the feature map: \(k(x, x') \approx \langle \phi(x), \phi(x') \rangle_{\mathbb{R}^M}\).
[17]:
# xs are random points from above
_, embedding = feature_map(xs, params_32)
print('xs (shape = %s):\n%s' % (xs.shape, xs))
print('')
print('emedding (shape = %s):\n%s' % (embedding.shape, embedding))
kernel_mat_32 = kernel.K(params_32, xs, xs)
kernel_mat_32_alt = np.matmul(embedding, embedding.T)
print('')
print('||k(xs, xs) - phi(xs) * phi(xs)^T|| =', np.linalg.norm(kernel_mat_32 - kernel_mat_32_alt))
xs (shape = (10, 1)):
[[ 815]
[ 723]
[1318]
[1077]
[1228]
[1396]
[ 664]
[ 689]
[ 279]
[1257]]
emedding (shape = (10, 1000)):
[[-8.42200073e-02 7.78922432e-02 -8.14512927e-02 ... 1.55952887e-16
4.32904832e-17 -4.41593047e-06]
[-8.42200073e-02 7.99841264e-02 2.98501402e-03 ... 1.78109186e-16
-2.34763126e-16 -2.71781567e-07]
[-8.42200073e-02 7.53365310e-02 1.85848612e-02 ... -1.14544279e-15
1.16885850e-15 3.40231081e-05]
...
[-8.42200073e-02 7.44611643e-02 2.59101338e-02 ... -2.39419437e-16
-7.08522432e-16 2.85423403e-07]
[-8.42200073e-02 -8.26302074e-02 -1.29527289e-02 ... 4.77413235e-11
-3.28398203e-10 -1.32198750e-10]
[-8.42200073e-02 6.28688720e-03 7.31825447e-02 ... 2.41305577e-16
8.64724727e-11 -1.09915158e-10]]
||k(xs, xs) - phi(xs) * phi(xs)^T|| = 5.291463179630965e-16
Efficient Sampling using Feature Maps¶
GeometricKernels provides a simple tool to efficiently sample (without incurring cubic costs) the Gaussian process \(f \sim \mathrm{GP}(0, k)\), based on an approximate finite-dimensional feature map \(\phi\). The underlying machinery is briefly discussed in this documentation page.
The function sampler from geometric_kernels.sampling takes in a feature map and, optionally, the keyword argument s that specifies the number of samples to generate. It returns a function we name sample_paths.
sample_paths operates much like feature_map above: it takes in the points where to evaluate the samples and kernel parameters. Additionally, it takes in the keyword argument key that specifies randomness in the JAX style. sample_paths returns a tuple. Its first element is the updated key. Its second element is an array containing the value of samples evaluated at the input points.
[18]:
from geometric_kernels.sampling import sampler
sample_paths = sampler(feature_map, s=2)
# introduce random state for reproducibility (optional)
# `key` is jax's terminology
key = np.random.RandomState(seed=1234)
# new random state is returned along with the samples
key, samples = sample_paths(xs, params_32, key=key)
print('Two samples evaluated at the xs are:')
print(samples)
Two samples evaluated at the xs are:
[[ 0.77275869 -1.52829098]
[-1.21452727 -0.06940621]
[ 0.23058572 0.64250474]
[ 0.08260947 1.05482975]
[-1.11519435 -0.67198185]
[-0.52778908 -0.98505754]
[-0.37717195 1.29155181]
[-2.62774136 0.0351169 ]
[-0.80800992 -1.5333478 ]
[ 0.27926607 -0.30292827]]
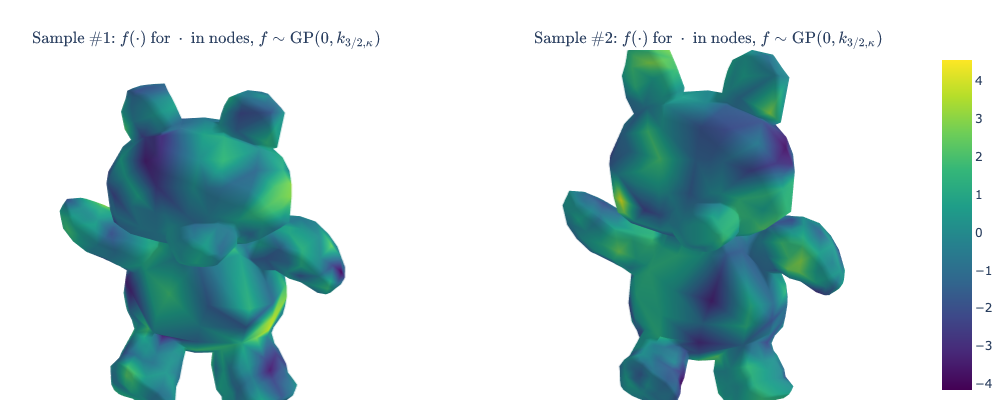
Visualizing Samples¶
Here we visualize samples as functions on a mesh.
[19]:
key = np.random.RandomState(seed=1234)
key, samples = sample_paths(other_points, params_32, key=key)
sample1 = samples[:, 0]
sample2 = samples[:, 1]
# Set the colorbar limits:
vmin = min(sample1.min(), sample2.min())
vmax = max(sample1.max(), sample2.max())
contours=dict(start=vmin, end=vmax)
# Various plots as plotly traces
sample1_plot = plot_mesh(mesh, vertices_colors=sample1, coloraxis = "coloraxis")
sample2_plot = plot_mesh(mesh, vertices_colors=sample2, coloraxis = "coloraxis")
# Setting up the layout
fig = make_subplots(
rows=1, cols=2,
specs=[[{'type': 'surface'}, {'type': 'surface'}]],
subplot_titles=(r"$\text{Sample #1: }f(\cdot)\text{ for }\cdot\text{ in nodes, }f \sim \mathrm{GP}(0, k_{3/2, \kappa})$",
r"$\text{Sample #2: }f(\cdot)\text{ for }\cdot\text{ in nodes, }f \sim \mathrm{GP}(0, k_{3/2, \kappa})$",
),
)
# Adding the traces
fig.add_trace(sample1_plot, row=1, col=1)
fig.add_trace(sample2_plot, row=1, col=2)
fig = update_figure(fig)
fig.layout.scene1.camera = camera
fig.layout.scene2.camera = camera
fig.update_layout(
margin={'t': 50},
coloraxis = {'colorscale':'viridis'},
)
fig.show('png', width=1000, height=400)
Citations¶
If you are using meshes and GeometricKernels, please consider citing
@article{JMLR:v26:24-1185,
author = {Peter Mostowsky and Vincent Dutordoir and Iskander Azangulov and No{\'e}mie Jaquier and Michael John Hutchinson and Aditya Ravuri and Leonel Rozo and Alexander Terenin and Viacheslav Borovitskiy},
title = {The GeometricKernels Package: Heat and Mat{\'e}rn Kernels for Geometric Learning on Manifolds, Meshes, and Graphs},
journal = {Journal of Machine Learning Research},
year = {2025},
volume = {26},
number = {276},
pages = {1--14},
url = {http://jmlr.org/papers/v26/24-1185.html}
}
@inproceedings{borovitskiy2020,
title={Matérn Gaussian processes on Riemannian manifolds},
author={Viacheslav Borovitskiy and Alexander Terenin and Peter Mostowsky and Marc Peter Deisenroth},
booktitle={Advances in Neural Information Processing Systems},
year={2020}
}
@article{sharp2020,
author={Nicholas Sharp and Keenan Crane},
title={A Laplacian for Nonmanifold Triangle Meshes},
journal={Computer Graphics Forum (SGP)},
volume={39},
number={5},
year={2020}
}
[ ]: