[1]:
# To run this in Google Colab, uncomment the following line
# !pip install geometric_kernels
# If you want to use a version of the library from a specific branch on GitHub,
# say, from the "devel" branch, uncomment the line below instead
# !pip install "git+https://github.com/geometric-kernels/GeometricKernels@devel"
Gaussian Process Regression on a Mesh with GPflow¶
This notebooks shows how to fit a GPflow Gaussian process (GP) on a mesh.
[2]:
# Import a backend, we use gpflow in this example.
import tensorflow as tf
import gpflow
# Import the geometric_kernels backend.
import geometric_kernels
import geometric_kernels.tensorflow
# Import the Mesh space and the general-purpose MaternGeometricKernel
from geometric_kernels.spaces.mesh import Mesh
from geometric_kernels.kernels import MaternGeometricKernel
# The GPflow frontend of GeometricKernels
from geometric_kernels.frontends.gpflow import DefaultFloatZeroMeanFunction, GPflowGeometricKernel
# Sampling routines we will use to create a dummy dataset
from geometric_kernels.kernels import default_feature_map
from geometric_kernels.sampling import sampler
from geometric_kernels.utils.utils import make_deterministic
# Stuff
import numpy as np
import plotly.graph_objects as go
from plotly.subplots import make_subplots
from pathlib import Path
# If you remove these, there will be lots of beartype-related warnings during optimization
tf.autograph.set_verbosity(0)
tf.get_logger().setLevel("ERROR")
INFO (geometric_kernels): Numpy backend is enabled. To enable other backends, don't forget to `import geometric_kernels.*backend name*`.
INFO (geometric_kernels): We may be suppressing some logging of external libraries. To override the logging policy, call `logging.basicConfig`.
INFO (geometric_kernels): Tensorflow backend enabled.
Mesh Plotting Utils for plotly¶
[3]:
def update_figure(fig):
"""Utility to clean up figure"""
fig.update_layout(scene_aspectmode="cube")
fig.update_scenes(xaxis_visible=False, yaxis_visible=False, zaxis_visible=False)
# fig.update_traces(showscale=False, hoverinfo="none")
fig.update_layout(margin=dict(l=0, r=0, t=0, b=0))
fig.update_layout(plot_bgcolor="rgba(0,0,0,0)", paper_bgcolor="rgba(0,0,0,0)")
fig.update_layout(
scene=dict(
xaxis=dict(showbackground=False, showticklabels=False, visible=False),
yaxis=dict(showbackground=False, showticklabels=False, visible=False),
zaxis=dict(showbackground=False, showticklabels=False, visible=False),
)
)
return fig
def plot_mesh(mesh: Mesh, vertices_colors = None, **kwargs):
plot = go.Mesh3d(
x=mesh.vertices[:, 0],
y=mesh.vertices[:, 1],
z=mesh.vertices[:, 2],
i=mesh.faces[:, 0],
j=mesh.faces[:, 1],
k=mesh.faces[:, 2],
intensity=vertices_colors,
**kwargs
)
return plot
Defining a Space¶
First, we create a GeometricKernels space that corresponds to a teddy bear mesh loaded from “../data/teddy.obj”
[4]:
mesh = Mesh.load_mesh(str(Path.cwd().parent / "data" / "teddy.obj"))
print("Number of vertices in the mesh:", mesh.num_vertices)
Number of vertices in the mesh: 1598
Now we actually visualize the mesh.
[5]:
# Define the camera
camera = dict(
up=dict(x=0, y=1, z=0),
center=dict(x=0, y=0, z=0),
eye=dict(x=0, y=0.7, z=1.25)
)
plot = plot_mesh(mesh)
fig = go.Figure(plot)
update_figure(fig)
fig.update_layout(
scene_camera=camera
)
fig.show("png")

Create a Dummy Dataset on the Mesh¶
We sample from the prior of a GP to create a simple dataset we can afterwards fit using an exact Gaussian process regression (GPR) model.
The input set \(X \in \mathbb{N}^{n \times 1}\) consists of indices enumerating vertices of the mesh. Consequently, the elements of \(X\) are in \([0, N_v-1]\), where \(N_v\) are the number of vertices in the mesh. We sample num_data of them into the tensor called xs_train. For test inputs xs_test, we use the whole \(X\).
[6]:
num_data = 50
key = tf.random.Generator.from_seed(1234)
xs_train = key.uniform(shape=(num_data, 1), minval=0, maxval=mesh.num_vertices, dtype=tf.int64)
xs_test = tf.range(mesh.num_vertices, dtype=tf.int64)[:, None]
# print("xs_train:", xs_train)
# print("xs_test:", xs_test)
To generate the corresponding outputs ys_train and ys_test, we sample from the prior. To do this, we create a MaternGeometricKernel object and use the efficent sampling functionality of GeometricKernels.
[7]:
base_kernel = MaternGeometricKernel(mesh)
params = base_kernel.init_params()
params["lengthscale"] = tf.convert_to_tensor([5.0], dtype=tf.float64)
params["nu"] = tf.convert_to_tensor([2.5], dtype=tf.float64)
feature_map = default_feature_map(kernel=base_kernel)
sample_paths = make_deterministic(sampler(feature_map), key)
_, ys_train = sample_paths(xs_train, params)
key, ys_test = sample_paths(xs_test, params)
assert(tf.math.reduce_all(tf.equal(tf.gather(ys_test, xs_train[:, 0]), ys_train)))
# print("ys_train:", ys_train)
# print(tf.gather(ys_test, xs_train[:, 0]))
Build a GPflow Model¶
Now we wrap the base_kernel created above into the GPflowGeometricKernel to make an actual GPflow kernel.
Note: params are external to the base_kernel object, thus we need to pass them to the GPflowGeometricKernel explicitly. Otherwise it will use params = base_kernel.init_params(). The trainable_nu parameter changes whether to treat the smoothness parameter "nu" as trainable or fixed. trainable_nu = True only works for finite values of "nu", it is incompatible with nu = inf.
[8]:
kernel = GPflowGeometricKernel(base_kernel, nu = params["nu"],
lengthscales=params["lengthscale"],
variance=1.0,
trainable_nu=False)
We use the data xs_train, ys_train and the GPflow kernel kernel to construct a GPflow model.
Note: We use DefaultFloatZeroMeanFunction mean: the ZeroMeanFunction that GPflow uses by default sets the output dtype equal to the input’s dtype, while DefaultFloatZeroMeanFunction sets it to default_float instead.
[9]:
model = gpflow.models.GPR(
(xs_train, ys_train), kernel, mean_function=DefaultFloatZeroMeanFunction(), noise_variance=1e-4
)
from gpflow.utilities import print_summary
print("Initial model:")
print("kernel.nu = ", kernel.nu)
print_summary(model)
print("Initial negative log marginal likelihood:", -model.log_marginal_likelihood().numpy())
Initial model:
kernel.nu = tf.Tensor([2.5], shape=(1,), dtype=float64)
╒═════════════════════════╤═══════════╤══════════════════╤═════════╤═════════════╤═════════╤═════════╤════════════════════════╕
│ name │ class │ transform │ prior │ trainable │ shape │ dtype │ value │
╞═════════════════════════╪═══════════╪══════════════════╪═════════╪═════════════╪═════════╪═════════╪════════════════════════╡
│ GPR.kernel.lengthscales │ Parameter │ Softplus │ │ True │ (1,) │ float64 │ [5.] │
├─────────────────────────┼───────────┼──────────────────┼─────────┼─────────────┼─────────┼─────────┼────────────────────────┤
│ GPR.kernel.variance │ Parameter │ Softplus │ │ True │ () │ float64 │ 1.0 │
├─────────────────────────┼───────────┼──────────────────┼─────────┼─────────────┼─────────┼─────────┼────────────────────────┤
│ GPR.likelihood.variance │ Parameter │ Softplus + Shift │ │ True │ () │ float64 │ 0.00010000000000000011 │
╘═════════════════════════╧═══════════╧══════════════════╧═════════╧═════════════╧═════════╧═════════╧════════════════════════╛
Initial negative log marginal likelihood: 139298.86264833246
Train the Model (Optimize Hyperparameters)¶
[10]:
opt = gpflow.optimizers.Scipy()
print("Starting training...")
opt_logs = opt.minimize(model.training_loss, model.trainable_variables, options=dict(maxiter=100))
print("Final model:")
print_summary(model)
print("Final negative log marginal likelihood:", -model.log_marginal_likelihood().numpy())
Starting training...
Final model:
╒═════════════════════════╤═══════════╤══════════════════╤═════════╤═════════════╤═════════╤═════════╤════════════╕
│ name │ class │ transform │ prior │ trainable │ shape │ dtype │ value │
╞═════════════════════════╪═══════════╪══════════════════╪═════════╪═════════════╪═════════╪═════════╪════════════╡
│ GPR.kernel.lengthscales │ Parameter │ Softplus │ │ True │ (1,) │ float64 │ [5.16664] │
├─────────────────────────┼───────────┼──────────────────┼─────────┼─────────────┼─────────┼─────────┼────────────┤
│ GPR.kernel.variance │ Parameter │ Softplus │ │ True │ () │ float64 │ 5895.29149 │
├─────────────────────────┼───────────┼──────────────────┼─────────┼─────────────┼─────────┼─────────┼────────────┤
│ GPR.likelihood.variance │ Parameter │ Softplus + Shift │ │ True │ () │ float64 │ 1e-06 │
╘═════════════════════════╧═══════════╧══════════════════╧═════════╧═════════════╧═════════╧═════════╧════════════╛
Final negative log marginal likelihood: 256.78736390084214
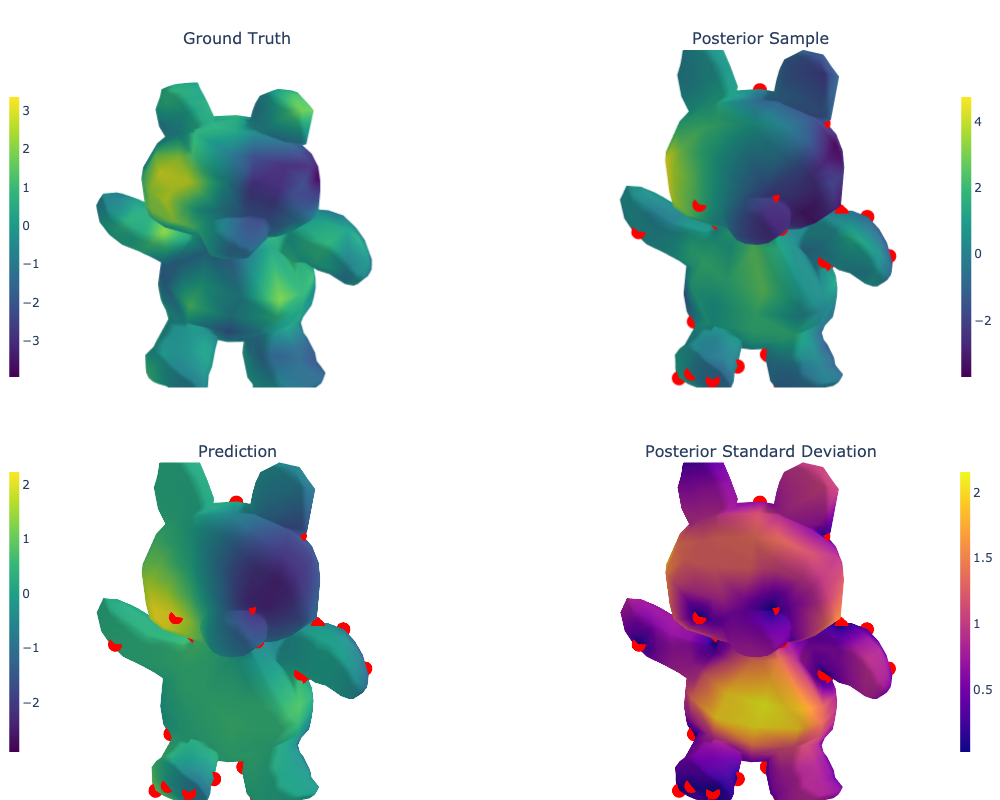
Draw Predictions and Evaluate the Model¶
Recall that xs_test contains all the locations on the mesh, i.e. all numbers from the set \(\{0, 1, \ldots, N_v-1\}\).
[11]:
# predict mean and variance
posterior_mean, posterior_variance = model.predict_f(xs_test)
posterior_mean = posterior_mean.numpy()
posterior_std = np.sqrt(posterior_variance.numpy())
# predict sample
sample = model.predict_f_samples(xs_test).numpy()
[12]:
# Mark training data
training_data_coords = tf.gather(mesh.vertices, xs_train[:, 0])
training_data_plot = go.Scatter3d(
x=np.array(training_data_coords[:, 0]),
y=np.array(training_data_coords[:, 1]),
z=np.array(training_data_coords[:, 2]),
mode = "markers",
marker_color = "red",
name="",
showlegend=False,
)
# Various plots as plotly traces
ground_truth_plot = plot_mesh(mesh, vertices_colors=ys_test, colorscale="Viridis",
colorbar=dict(
x=0,
y=0.75,
xanchor="center",
yanchor="middle",
len=0.4,
thicknessmode="fraction",
thickness=0.01)
)
sample_plot = plot_mesh(mesh, vertices_colors=sample, colorscale="Viridis",
colorbar=dict(
x=1.0,
y=0.75,
xanchor="center",
yanchor="middle",
len=0.4,
thicknessmode="fraction",
thickness=0.01)
)
posterior_mean_plot = plot_mesh(mesh, vertices_colors=posterior_mean, colorscale="Viridis",
colorbar=dict(
x=0.0,
y=0.25,
xanchor="center",
yanchor="middle",
len=0.4,
thicknessmode="fraction",
thickness=0.01)
)
posterior_std_plot = plot_mesh(mesh, vertices_colors=posterior_std, colorscale="Plasma",
colorbar=dict(
x=1.0,
y=0.25,
xanchor="center",
yanchor="middle",
len=0.4,
thicknessmode="fraction",
thickness=0.01)
)
# Setting up the layout
fig = make_subplots(
rows=2, cols=2,
specs=[[{"type": "surface"}, {"type": "surface"}],
[{"type": "surface"}, {"type": "surface"}]],
subplot_titles=(r"Ground Truth",
r"Posterior Sample",
r"Prediction",
r"Posterior Standard Deviation"),
vertical_spacing=0.1)
# Adding the traces
fig.add_trace(ground_truth_plot, row=1, col=1)
fig.add_trace(training_data_plot, row=1, col=2)
fig.add_trace(sample_plot, row=1, col=2)
fig.add_trace(training_data_plot, row=2, col=1)
fig.add_trace(posterior_mean_plot, row=2, col=1)
fig.add_trace(training_data_plot, row=2, col=2)
fig.add_trace(posterior_std_plot, row=2, col=2)
fig = update_figure(fig)
fig.layout.scene1.camera = camera
fig.layout.scene2.camera = camera
fig.layout.scene3.camera = camera
fig.layout.scene4.camera = camera
fig.update_layout(
margin={"t": 50},
)
fig.show("png", width=1000, height=800)
Citations¶
If you are using meshes and GeometricKernels, please consider citing
@article{JMLR:v26:24-1185,
author = {Peter Mostowsky and Vincent Dutordoir and Iskander Azangulov and No{\'e}mie Jaquier and Michael John Hutchinson and Aditya Ravuri and Leonel Rozo and Alexander Terenin and Viacheslav Borovitskiy},
title = {The GeometricKernels Package: Heat and Mat{\'e}rn Kernels for Geometric Learning on Manifolds, Meshes, and Graphs},
journal = {Journal of Machine Learning Research},
year = {2025},
volume = {26},
number = {276},
pages = {1--14},
url = {http://jmlr.org/papers/v26/24-1185.html}
}
@inproceedings{borovitskiy2020,
title={Matérn Gaussian processes on Riemannian manifolds},
author={Viacheslav Borovitskiy and Alexander Terenin and Peter Mostowsky and Marc Peter Deisenroth},
booktitle={Advances in Neural Information Processing Systems},
year={2020}
}
@article{sharp2020,
author={Nicholas Sharp and Keenan Crane},
title={A Laplacian for Nonmanifold Triangle Meshes},
journal={Computer Graphics Forum (SGP)},
volume={39},
number={5},
year={2020}
}